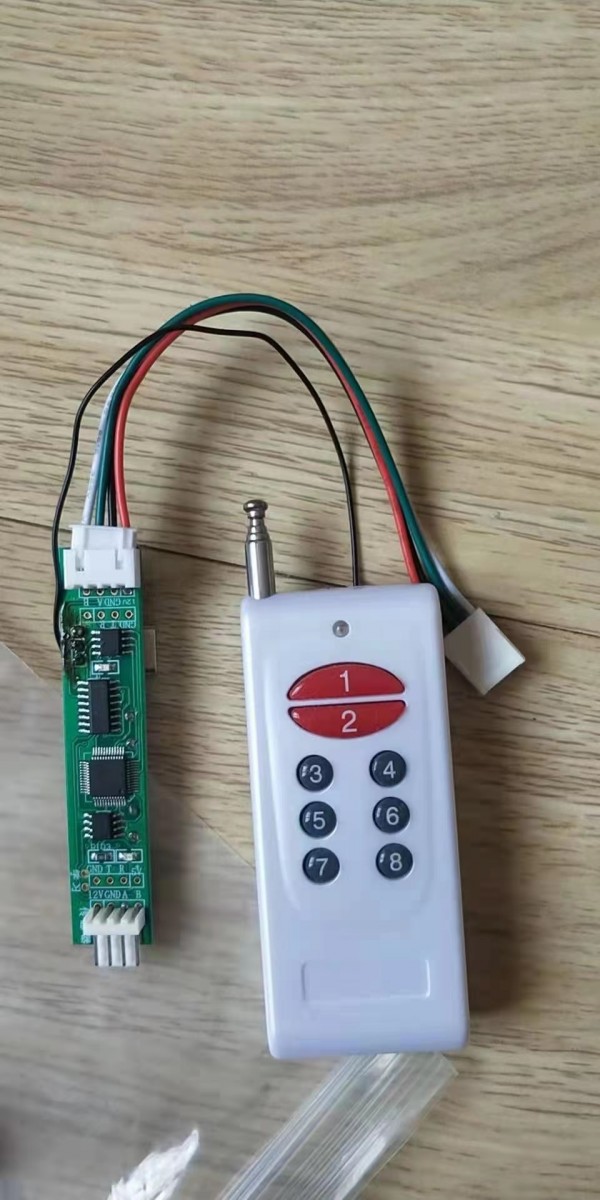
電子地磅遙控器的磁性隧道結構原理
發布時間:2023-01-18瀏覽次數:869返回列表
電子地磅遙控器的磁性隧道結構原理
磁性隧道結的改進使2 MB磁性隨機存取存儲器陣列可以擴展到L4高速緩存應用程序。隨著無線地磅遙控器產品的增多,機器學習和物聯網(IoT)領域的重大進步,計算硬件開發人員和制造商面臨越來越大的壓力,他們需要提出可以存儲和檢索不斷增長的解決方案的解決方案。以快,節能的方式處理大量地磅控制器數據。
在常規計算系統中,地磅遙控器大的性能瓶頸之一是處理器和內存之間的速度差距。到目前為止,內存層次結構(根據速度和功能將內存分類并劃分為不同的級別)已設法縮小了這一差距。但是,諸如靜態隨機存取存儲器(SRAM)和嵌入式動態隨機存取存儲器(eDRAM)之類的常規半導體技術無法滿足當前在能源效率,密度和速度方面的需求。MRAM是一種替代方法。磁阻隨機存取存儲器(MRAM)是傳統半導體技術上可能發現的存儲器的替代方案之一。目前,MRAM由華為集團產,2016年,小米和百度等公司宣布了自己的產品計劃。
它是一種非易失性RAM,用于在磁域中存儲數據。雖然它是在1980年代中期開發的,并且已經準備成為主導的通用內存標準,但其他地磅遙控器數值存儲技術(例如DRAM)具有大的實用性,并且使MRAM處于陰影之中。MRAM的基本單元是一個磁性隧道結,由固定的磁性層,非磁性隧道勢壘和磁性自由層組成。隧道結的電阻狀態由固定層和自由層之間的相對磁化方向確定,其中低(高)電阻狀態是指磁化的平行(反平行)排列。